Vibrations and Acoustics Laboratory
Department Lab
Laboratory Incharge:
Atanu Banerjee
Scientific Officer:
Dhruba Jyoti Bordoloi
Technical Staff:
Contact Number:
+91 361 2582667
About Lab
This lab demonstrates basic vibrational instruments to students at undergraduate level. Also provides facilities for measurement of frequency signals, rpm etc, and facilities for data-acquisition which are very much beneficial for research activities in the domain of vibrational analysis.
Lab Equipments
(Click on equipment for more information)
Digital non-contact tachometer


Displacement measuring system (eddy current base)


2-channels FFT Analyser, generator module with PULSE software


Impact Hammer


Amplifier of the Exciter


Deltatron (ICP) accelerometers (4396 and 4395 type)
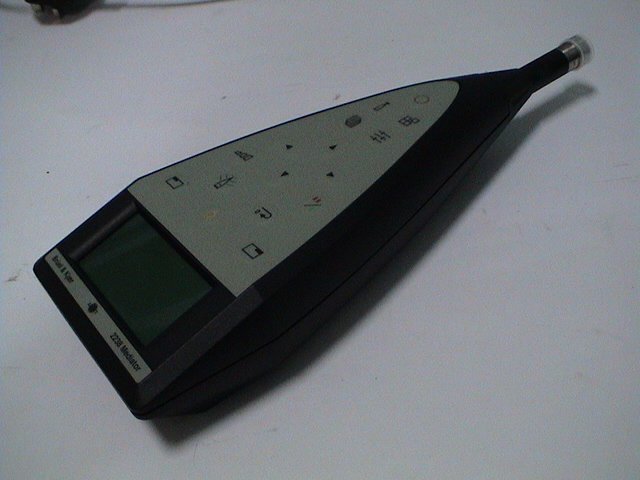

Mediator – Sound level meter


Microphone 1/8", 1/4", ½" with amplifier


Pistphone calibrator


Stroboscope


Exciter


Reflectance-Compensated/ Reflectance-Dependent, non-contact fiber optic displacement sensor: total range 5.07mm/ 6.35mm/ 12.7mm


2 Analog and 16 digital 100-MHz mixed storage oscilloscope


General purpose accelerometer ICP type (4507)


Endevco type 2311- force transducer


Band pass filter (1617)


Calibrator exciter for accelerometer (4294)


4-channel SONY data recorder for DAT medium


Acoustic Contact Sensor, Freq.-1 MHz


LAN based pulse system 3560D with 16-Channel
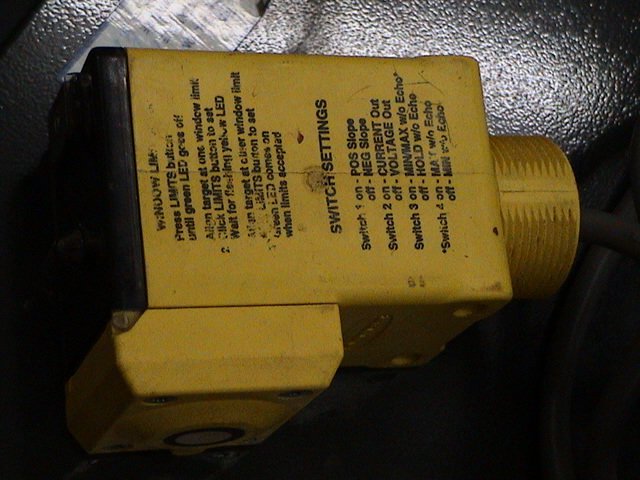

Ultrasonic 0-600mm Displacement Sensor with display indicator

The display unit of the LVDT


Acoustic sensors
2 DOF Rotor System Set-up


Free Vibration of Cantilever Beam Set-up


Forced Vibration of Cantilever Beam Set-up
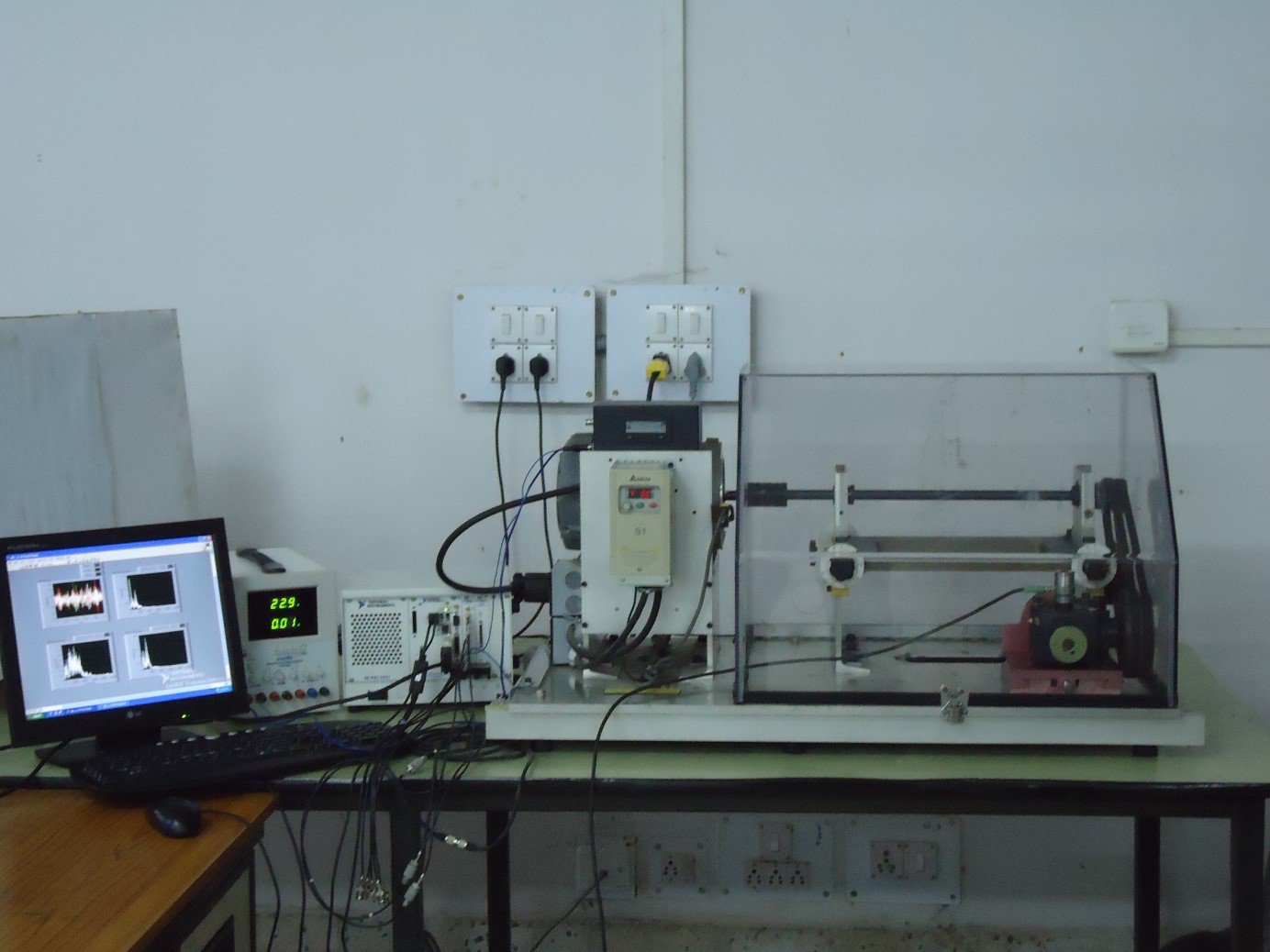

Machinery Fault Simulator
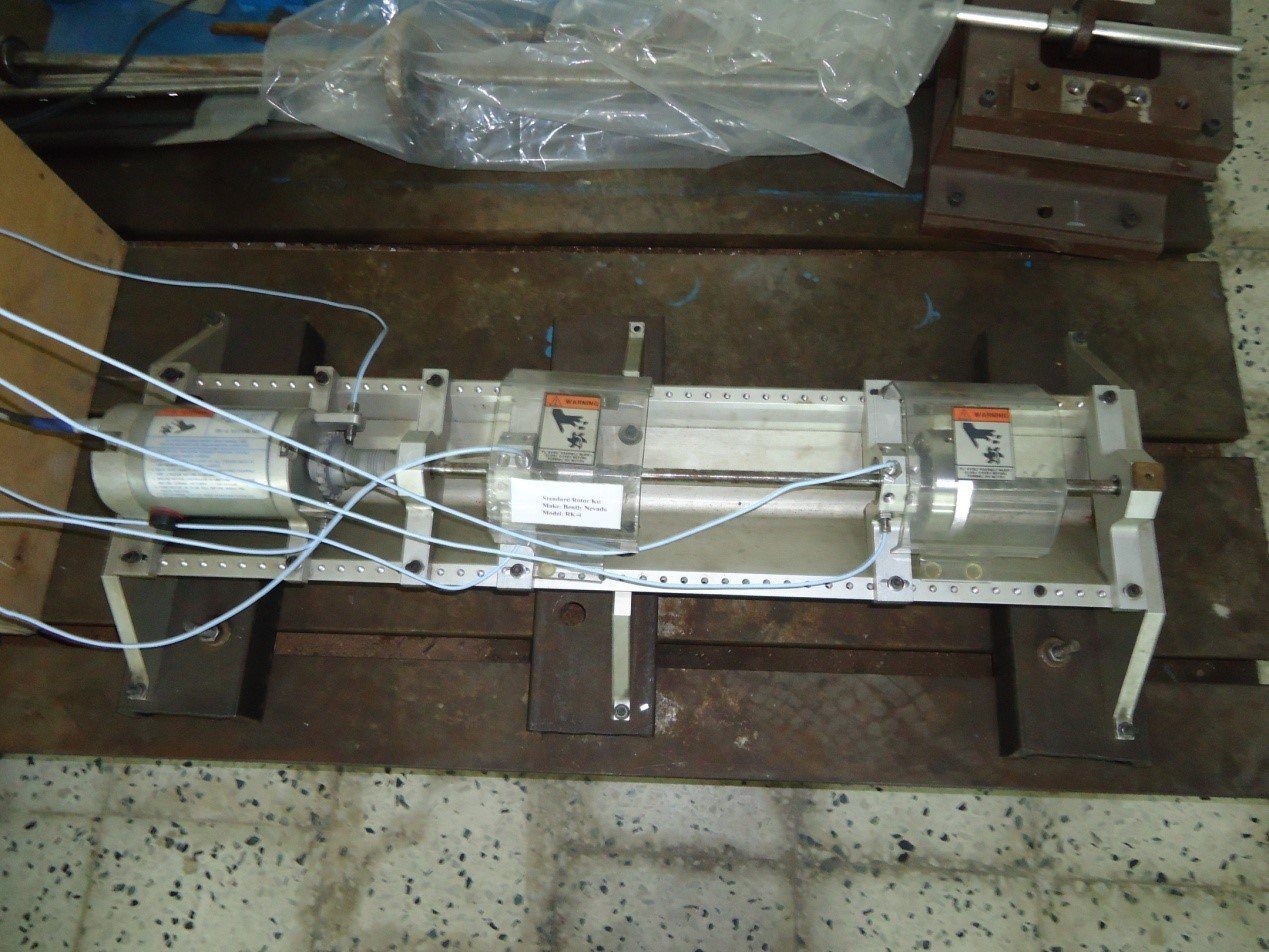

RK4 Rotor Kit


3D Force and Moment Measuring Base


Belt Driven Balancing Machine


Hydraulic Mobile Floor Crane


dSPACE ACE Kit 1103
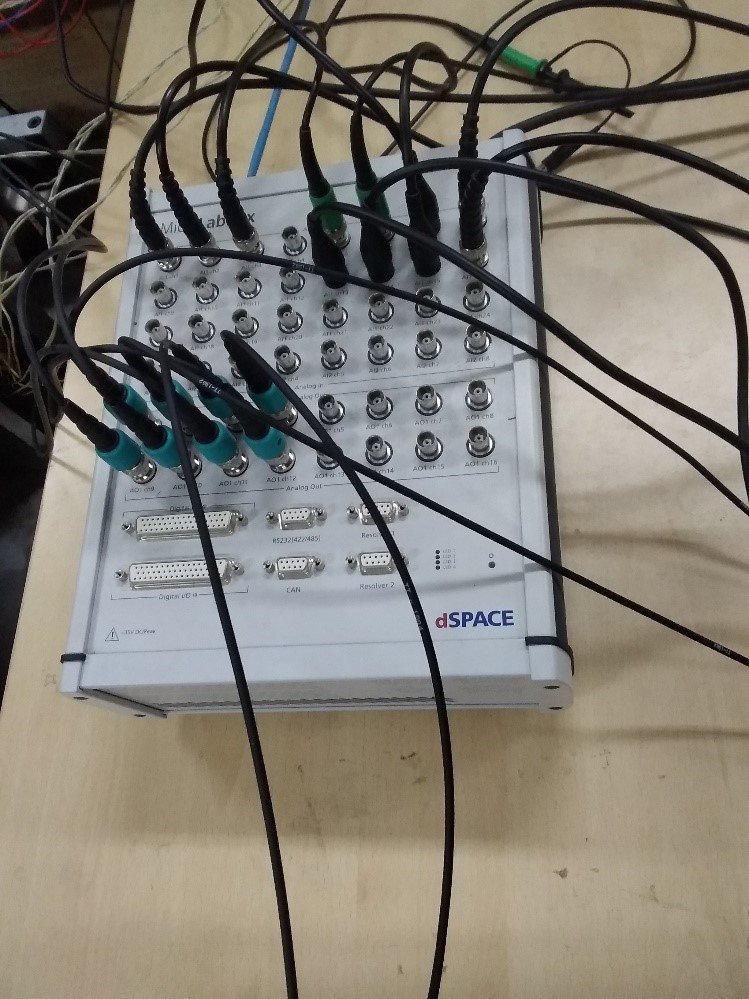

Micro Lab Box
Following are the machines/equipments in this lab:
- Digital non-contact tachometer, 1 – 99999 rpm
- Photo electric tacho probe
- Displacement measuring system (eddy current base) (two 25mm dia probe with display unit)
- Reflectance-Compensated/ Reflectance-Dependent, non-contact fiber optic displacement sensor: total range 5.07mm/ 6.35mm/ 12.7mm
- Ultrasonic 0-600mm Displacement Sensor with display indicator
- Spring Push LVDT with 3m low noise cable, Range 0-4mm, 0-10mm, 0-20mm, 0-40mm, 0-100mm with indicator
- Deltatron (ICP) accelerometers 10mV/ms-2, max 700 ms-2,Delta tron accelerometer 1mV/ms-2, max 700 ms-2
- ICP Type Accelerometer 10mV/ms-2, 1-6 kHz
- Miniature accelerometer with conditioner 100mV/g, 0.5 to 100 Hz
- Triaxial accelerometer 100 mV/g
- Force transducer 2.2 kN tensile/compressive
- Force transducer 4500 N (Comp.), 2200 N (ten.), 23.27 mV/N
- Force transducer, (15, 15 30 kN),
- Microphone with amplifier ½” (3 – 40KHz), ½” (3 – 40KHz), ¼”, 1/8” (6-140kHz)
- Acoustics sensors with pre-amplifier, 1 MHz
- Digital Gauss meter Gauss meter, 0-2kG
- Proximity probe 3300 NSV
- Non contact Temperature Indicator
- Laser optical displacement sensor
- High sensitivity accelerometer
- Rotary torque sensor with accessories
- Handheld Digital Tachometer
- Pressure Transmitter, 0-60 psi, 15 to 15 psi
- Band pass filter (1617) 1Hz to 200kHz
- Impact Hammer
- Vibration exciter (100 N) with amplifier
- Vibration test system (500 lbf) including : low distortion linear amplifier with software
- Model shaker, 100N with amplifier
- 4 Channel deltatron conditioning amplifier
- Measuring amplifier
- 4-channel SONY data recorder for DAT medium
- ACE kit 1006 & DS2201 with PX10/814/817 opto
- Micro Lab Box
- Digital storage oscilloscope, 200 MHz, 4 ch
- Constant DC voltage supplier DC 30V/2A, ±15V/1A
- Programmable DC voltage supplier
- DC regulated power supply, 0-30V, 0-10A
- Pistphone calibrator 250 Hz, 124dB
- Calibrator exciter for accelerometer (4294)
- 16 MHz, 2 channel programmable waveform generator, 16 MHz,
- Signal generator
- Dial Gauge 0-50 mm, 0.01 mm resolution ,Vernier height Gauge 0-300 mm, 0.02 mm resolution
- AC/Dc Clamp meter
- Logging multimeter
- Digital multimeter
- AC/DC current probe
- Servo motor with DC drive of 12V,60W, 1500rpm
- Phantom Omni Device 6.4W x 4.8H x 2.8 D in. work space,
- VFD
- Belt Driven Balancing machine
- Hydraulic manual operator mobile floor crane
- Analog PWM Servo Drive
- Permanent Magnet Break (Hollow bore configuration)
- CI Floor plate/ base plate 2000x1000x250 mm
- RK-4 Rotor kit
- Machinery fault simulator
- Free and Forced Cantilever Beam experimental setup
- Transverse beam vibration setup