ONGOING PROJECTS
EEG CHARACTERIZATION OF POST STROKE MOTOR IMAGERY INDUCED MENTAL FATIGUE FOR ADAPTIVE NEUROREHABILITATION

The hand plays a crucial role in daily living activities. Loss of functionality of the hand due to stroke or other disabling diseases lead to inability to carry out activities of daily living.
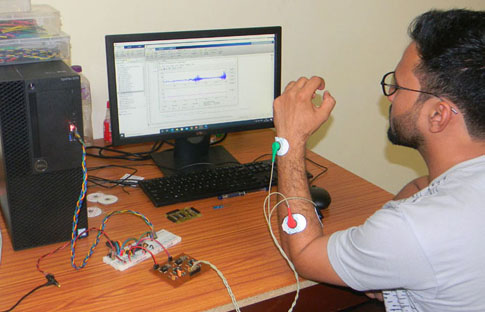
Hand rehabilitation devices play a significant role in recovering the lost functions of hand. A hybrid Brain Computer Interface (BCI) technology can be used by combining the signals from the brain and muscles to drive the hand exoskeleton.
The signals from the brain and muscles collected in the form of electroencephelogram (EEG) and electromyogram (EMG) signals respectively are non-stationary. A robust adaptive controller can be developed to deal with the nonstationarity of signals. The work planned to be undertaken as part of PhD research is to design and develop a hand exoskeleton. A collaborative adaptive controller will be designed for the hybrid BCI i.e., EEG-EMG controlled based hand exoskeleton for neurorehabilitation.
FIVE FINGERED BIONIC PROSTHETIC HAND
Prosthetic hands have made a significant influence on the quality of life of people with upper arm amputation. However, the functionality of even the most sophisticated bionic hands does not match the biological human hand. A prosthetic hand requires a sense of reflex from the context of the grasped objects. Such a reflex, known as a bionic reflex is the emulation of the human grasp reflex in a prosthetic hand.
The challenges in bionic reflex include slippage prevention of the grasped object. An intuitive reaction to slippage of grasped objects is to increase the grip force. Such an increase needs to be controlled so as not to induce any deformation. With the help of present-day robust control algorithms and sensor technology, it may be possible to achieve such a bionic reflex in a tendon-driven under-actuated prosthetic hand. The work undertaken as part of Ph.D. research is the emulation of bionic reflex control in a tendon-optimized 3D-printed under-actuated prosthetic hand. This is achieved through an adaptive slippage and deformation prevention controller based on detected stiffness.
Publications
Edited Volumes / Journal Special Issues
- H. Basumatary and S. M. Hazarika, "State of the Art in Bionic Hands," in IEEE Transactions on Human-Machine Systems, vol. 50, no. 2, pp. 116-130, April 2020, doi: 10.1109/THMS.2020.2970740.